高精度 6 轴姿态传感器/陀螺仪/IMU

产品介绍
6轴数据有线传输型姿态传感器/陀螺仪/IMU:USB、RS232或TTL
LPMS-HR 系列是专门针对人形机器人领域研发的一款高精度姿态传感器。它整合了三轴加速度计和三轴陀螺仪传感器,通过我公司独有的算法进行矫正和计算,能提供包括欧拉角、四元数和加速度等信息在内的精确数据。同时,该模块体积小巧,易于组装,方便用户嵌入到自己系统中进行开发和设计。
通讯方面,LPMS-HR系列针对不同的应用需求提供以下三种通讯方式供选择:USB、RS232或TTL,用户可根据实际通信需要选购对应型号。关于通讯接口的具体使用方法请参照其它相关说明文档。
主要参数
| 型号 | LPMS-HR USB | LPMS-HR RS232 | LPMS-HR TTL |
|---|---|---|---|
| 通信接口 | USB | RS232 | TTL |
| 工作电压[1] | 5V | 5~36V | 5~36V |
| 最大输入电流 | 38mA(@5V) | 38mA(@5V); 7mA(@36V) | 38mA(@5V); 7mA(@36V) |
| 功耗 | 0.13W(26mA@5V) | 0.105W(21mA@5V) | 0.095W(19mA@5V) |
| 通讯协议[2] | LPBUS/ASCII | LPBUS/ASCII | LPBUS/ASCII |
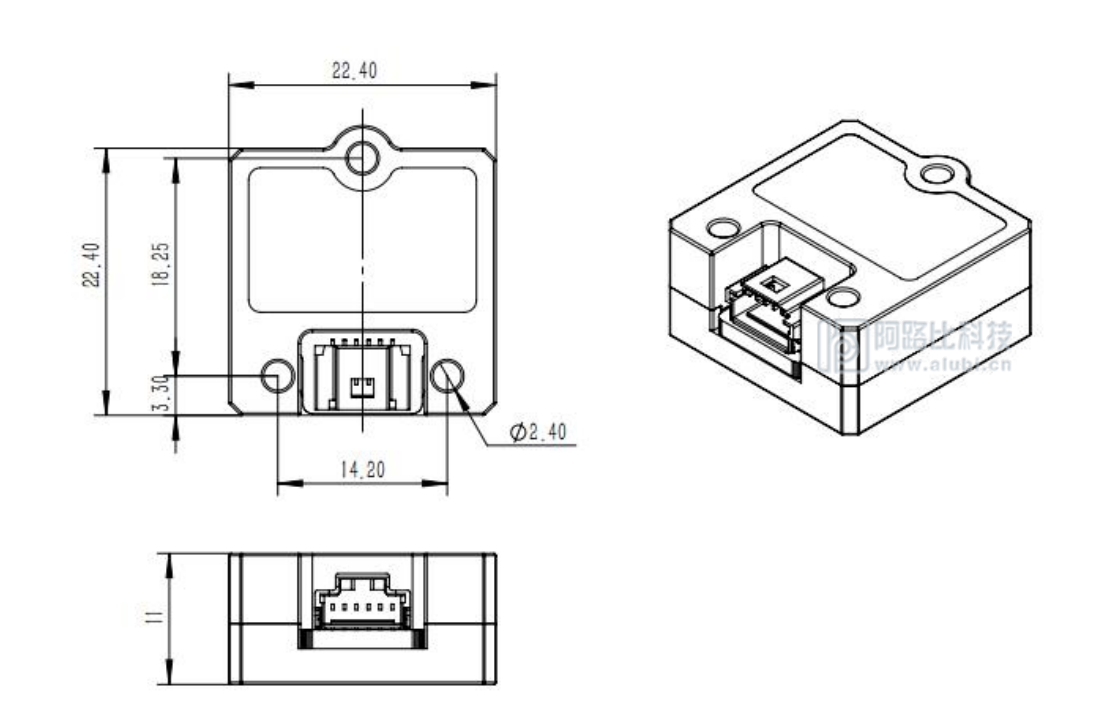
| 尺寸 | 22.4 x 22.4 x 11 mm | ||
| 重量 | 10(±0.5)g | ||
| 欧拉角范围 | Roll: ±180°; Pitch: ±90°; Yaw: ±180°; | ||
| 角度分辨率 | 0.01° | ||
| 时间同步 | 支持 | ||
| 波特率 | 9600~921600bps(默认115200bps) | ||
| 加速度计测量范围 | 3-axis,±3/±6/±12/±24g, 16bits | ||
| 加速度计静止零漂 | 20mg | ||
| 加速度计静止温漂 | <0.2mg/K | ||
| 加速度计零偏不稳定性 | 26.88ug | ||
| 加速度计随机游走 | 0.03m/s/√hr | ||
| 陀螺仪测量范围 | 3-axis, ±125/±250/±500/±1000/±2000, 16bits | ||
| 陀螺仪静止零漂 | ±1dps | ||
| 陀螺仪静止温漂 | ±0.015dps/K | ||
| 陀螺仪零偏不稳定性 | 4.41deg/√hr | ||
| 陀螺仪随机游走 | 1.45deg/h | ||
| 数据输出类型 | 原始数据/欧拉角/四元数/线性加速度/温度 | ||
| 输出频率 | 5~1000Hz(默认100Hz) | ||
| 外壳材料 | 铝合金 | ||
| 工作温度 | -40~85℃ | ||
| 接插件型号 | Molex5015680607 |
[注1]当使用 RS232\TTL 通讯后,若需接入大功率稳压电源时(如使用 48V 转 24V 输出的大功能稳压电源),在电源开启瞬间可能会产生瞬间大电流,此瞬间电流可能会超过传感器承受的最大额定值,进而可能损坏传感器。因此建议使用大功率稳压源给传感器供电时,进行分步通电,即传感器在稳压源开启稳定后,再进行供电接通.
[注2] ASCII 输出格式下,仍以 LPBUS 协议格式响应用户指令。 ASCII 输出的数据按 32 位浮点型数据进行换算。
主要特征
- MEMS 微型惯性测量单元(IMU)
- 集成三轴陀螺仪、三轴加速度计
- 实时计算传感器的姿态方向、线性加速度以及角速度等数据
- 支持同步信号输入
- 电源输入:5V(USB)、5~36V(RS232/TTL)
- 通信接口:USB、RS232、TTL
- 封装尺寸:22.4 x 22.4 x 11mm
- 工作温度:-40℃~85℃
应用领域
- 移动机器人
- 人形机器人
- 工程机械
- 平台稳定和控制
产品尺寸


{kind=link}