LPNAV – 用于自动导航车(AGV)的户外操作和二维地图构建
LPMS-NAV
博客,解决方案
LPNAV 实现灵活、快速的 AGV 部署
LPNAV可使自动导航车(AGV)能够快速了解其所处环境,并为安全高效地运行做好准备。不需要校准、手动构建地图等操作。在 LPNAV 的帮助下,移动物流平台可以使用相同的一套传感器(图 1)和统一的地图在室内和室外环境中自动运行(定位)。在这之前,如要将物品从仓库内运输到停在仓库前的卡车上是需要专门设备或人工操作才能实现的,而使用LPNAV即可安全高效地实现,这为将物品从室内转到室外的应用提供了大幅度节约成本的机会。
户外定位
在上一篇文章中,我们已经展示了 LPNAV 在狭小拥挤的室内环境中运行的能力。在对算法的进一步优化后,我们现在能够证明该系统在户外环境中运行良好。不受控制的户外环境是非常具有挑战性的,因为照明条件可能变化很大,行人、过往车辆等因素也会干扰感知。
在上面的视频中,我们展示了系统的以下功能:
- LPNAV 能够构建其所处环境的3D地图,并根据其起始位置进行实时定位。
- 先前获取的地图数据可用于定位,并根据环境变化自动更新。
- 当机器人被人工放置在地图上指定位置时,LPNAV 驱动的机器人可以立即重新定位。
- 在遮挡摄像头视线的情况下,该系统仍能够保持稳定和可靠地运行。传感器、IMU 和里程计的融合可实现在没有视觉特征的情况下进行临时操作。
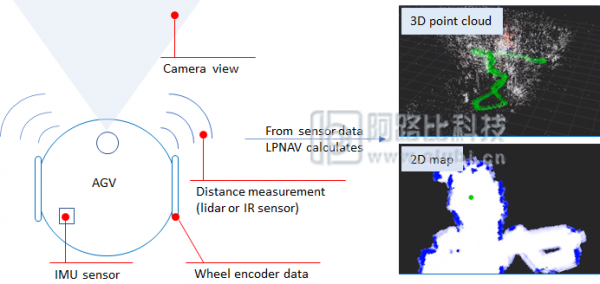

图 1 – LPNAV 结合了来自视觉 SLAM(摄像头)、惯性测量单元(IMU)、距离传感器(激光雷达、红外)和车轮编码器数据的信息,计算出低延迟、高精度的定位结果。机器人对周围环境进行地图绘制并同时生成一个3D点云图和一个便于人们理解的的2D障碍物地图。
2D实时地图构建
LPNAV 的视觉 SLAM 所构建的3D点云图可以很好地用于机器人在其所处环境中的计算定位,但人们很难直观地理解它们。因此,我们为 LPNAV 添加了一项功能,该功能允许基于来自其红外距离传感器的信息构建机器人所处环境的2D地图。若要在更大的距离上实现2D墙壁/障碍物地图的绘制,可以使用2D激光雷达来替代红外传感器。
内容由LP同事ThomasHauth提供


{kind=link}