IMU在四足机器人导航中的应用
随着社会的进步和科技的发展,机器人的应用领域逐渐扩大,而人们对机器人的功能需求也越来越高。四足机器人属于腿式机器人的一种,外形与四足动物相似,可以自主行走。四足机器人由于对恶劣复杂地形的适应性强,已经成为当今移动机器人研究的热点。
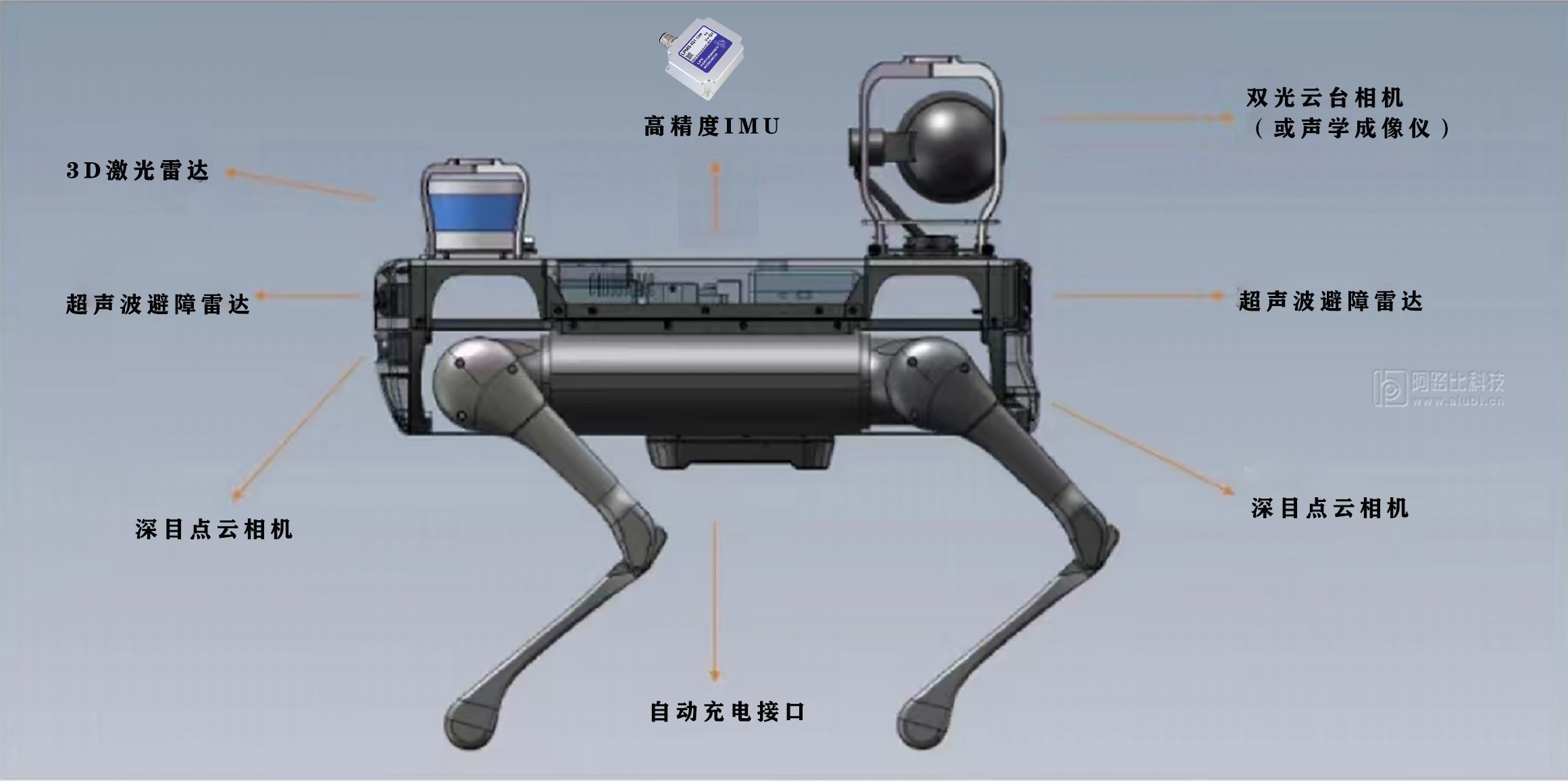

作为自主导航机器人,机器必须实时知晓自己的位置。而姿态传感器(IMU)是测量物体三轴姿态角(或角速率)以及加速度的设备,在机器人导航中有着很重要的应用。四足机器人从IMU、激光雷达等传感器获取信息,通过相关算法,实现即时定位与地图构建,或并发建图与定位。


{kind=link}